
Guiyi Dong
Welcome to my personal webpage! I came to Japan in October 2019 and received my Ph.D. degree from the
Graduate School of Maritime Sciences, Kobe University
in March 2025.
Currently, I am working at
Toyota Motor Corporation,
specializing in power electronics and drive technologies for robotic applications.
On this page, you can learn more about my research interests, projects, and publications.
Thank you for visiting!
News
🏆Guiyi DONG Awarded IEEE TPEL 2024 Second Place Prize Paper Award
The paper
“Over 98% Efficiency SiC-MOSFET Based Four-Phase Interleaved Bidirectional DC–DC Converter Featuring Wide-Range Voltage Ratio”
has received the 2024 Second Place Prize Paper Award from IEEE Transactions on Power Electronics (TPEL).
Guiyi Dong, as the second author, is among the award recipients.
Out of 1,241 papers published in 2024, only 16 (≈1.2%) were selected for this honor.
論文
“Over 98% Efficiency SiC-MOSFET Based Four-Phase Interleaved Bidirectional DC–DC Converter Featuring Wide-Range Voltage Ratio”
が IEEE Transactions on Power Electronics (TPEL) において
2024年度 優秀論文賞(Second Place Prize Paper Award) に選出されました。
Guiyi Dong は第2著者として受賞に名を連ねています。
本年度は、1,241篇中わずか16篇(約1.2%)が選出されました。
📢 Role: ITEC-AP 2025 Special Session Co-Chair
ITEC-AP 2025 にて、特別セッションの共同座長(Co-Chair)を務めることになりました。
https://www.itec-ap2025.com/?page_id=496
🏆 Award: 産業応用部門 優秀論文発表賞 2023
電気学会 産業応用部門より優秀論文発表賞を受賞しました。
🏆 Award: 産業応用部門 優秀論文発表賞 2022
電気学会 産業応用部門より優秀論文発表賞を受賞しました。
Publications
You can view my publications through the following platforms:

Publications marked with 📘 are journal articles. Entries without this symbol are international conference proceedings.
MISC
産業財産権
Technology Skills
- Embedded systems: STM32, Kinetis, FPGA, Arduino
- Embedded software: Keil, IAR, STM32CubeIDE
- Programming: C, Python, C#, MATLAB, HTML/CSS/JS
- PCB design: KiCAD
- Power electronics simulation: PSIM, SIMetrix/SIMPLIS
- Digital & analog circuit design
- AI tools
- Operating systems: Linux (Ubuntu), Windows
- Linux web server setup & management
- E-commerce: OpenCart deployment
- Typesetting: LaTeX
Education level
Previous research
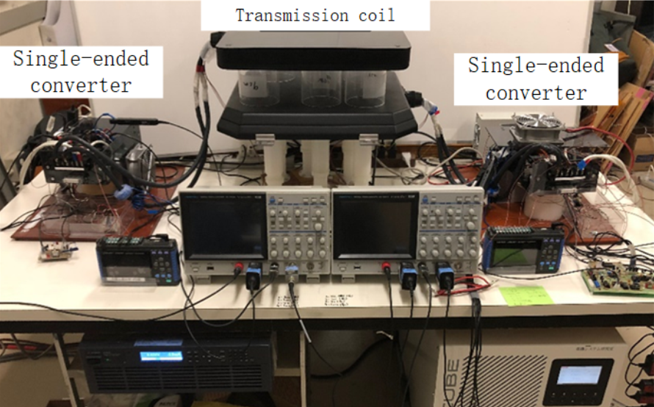
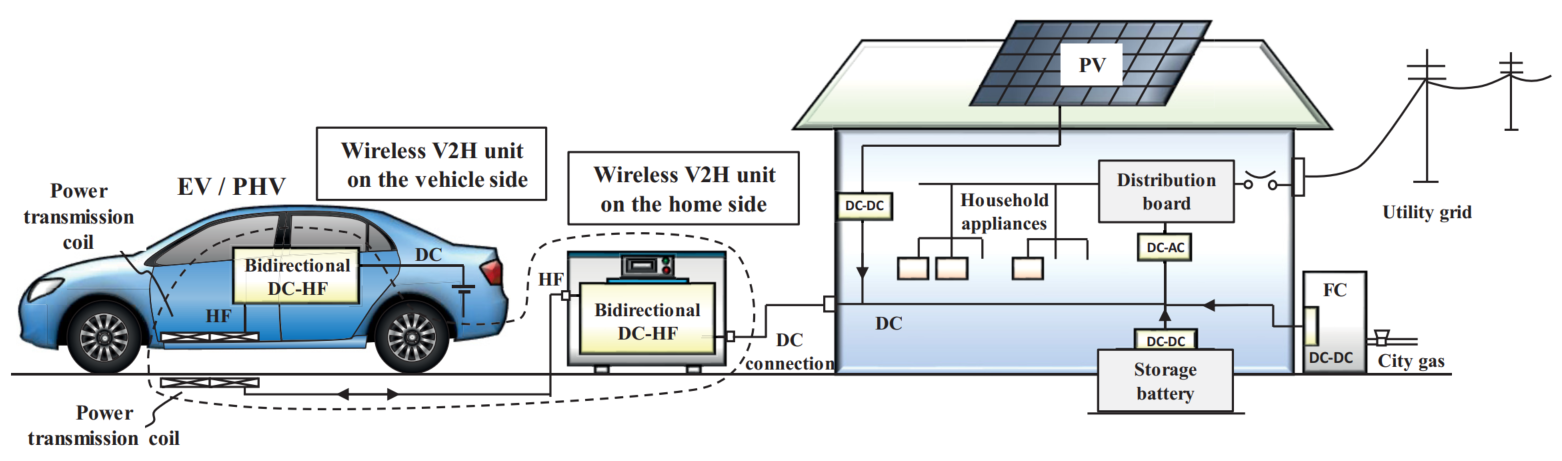
The bidirectional Wireless Power Transfer (WPT) device for vehicle-to-house (V2H) uses a simple, compact single-ended converter and self-synchronized phase-difference control mechanism. This research proposes a way whereby phase difference control could be self-contained on the slave side without mutual communication. This method allows for high-power wireless transmission despite the low coupling coefficient between the transfer coils. The phase difference and transmission power can be altered by changing the MOSFET conduction time on one side without synchronizing the phases on both sides.
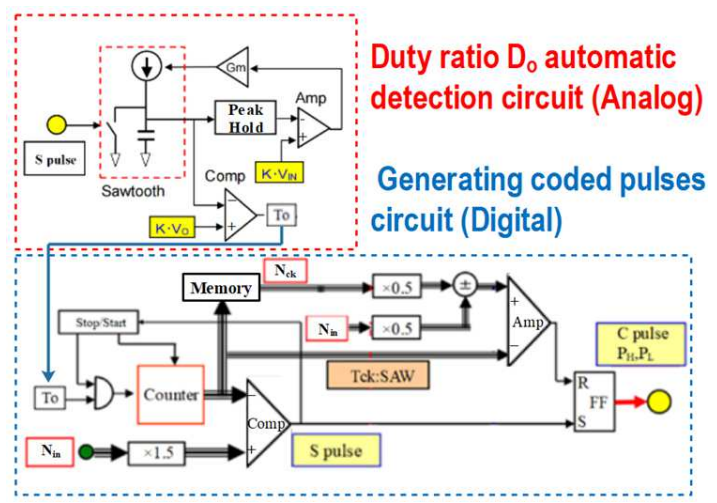
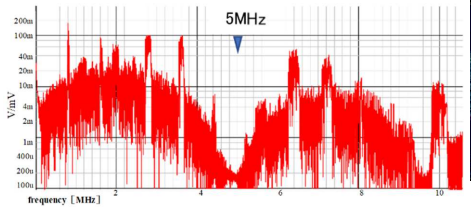
Two pulse coding control methods for generating notch frequency automatically in noise spread spectrum for switching DC-DC converters are proposed; these are based on our previously proposed method. Our two methods here generate the notch frequency Fn automatically according to the received frequency F in . The first one is a constant frequency PWM-controlled buck DC-DC converter where the clock frequency and coding pulse width are automatically set according to the frequency of the received signal to generate notch characteristics. The second one is a pulse frequency modulation (PFM) pulse coding DC-DC converter which generates a composite notch characteristic where both the constant pulse width and the periodic modulation coding pulse width are automatically matched with input frequency Fin.
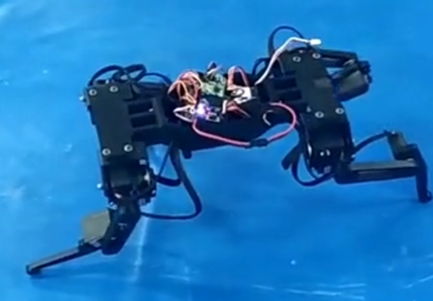
This undergraduate capstone project involved the design and development of a quadruped robot capable of being remotely controlled. The robot's electronic system is powered by an Arduino microcontroller and a Freescale KL series microcontroller, providing a reliable and efficient control platform. The chosen method for remote control is a PlayStation 2 (PS2) game controller, allowing the user to seamlessly operate the robot's movements. The controller communicates with the microcontrollers to execute different actions, such as walking, turning, and other pre-programmed movements. The project required a thorough understanding of robotics, microcontroller programming, and wireless communication. The completed quadruped robot demonstrates the potential applications of such technology in various fields, including exploration, search and rescue, and entertainment.
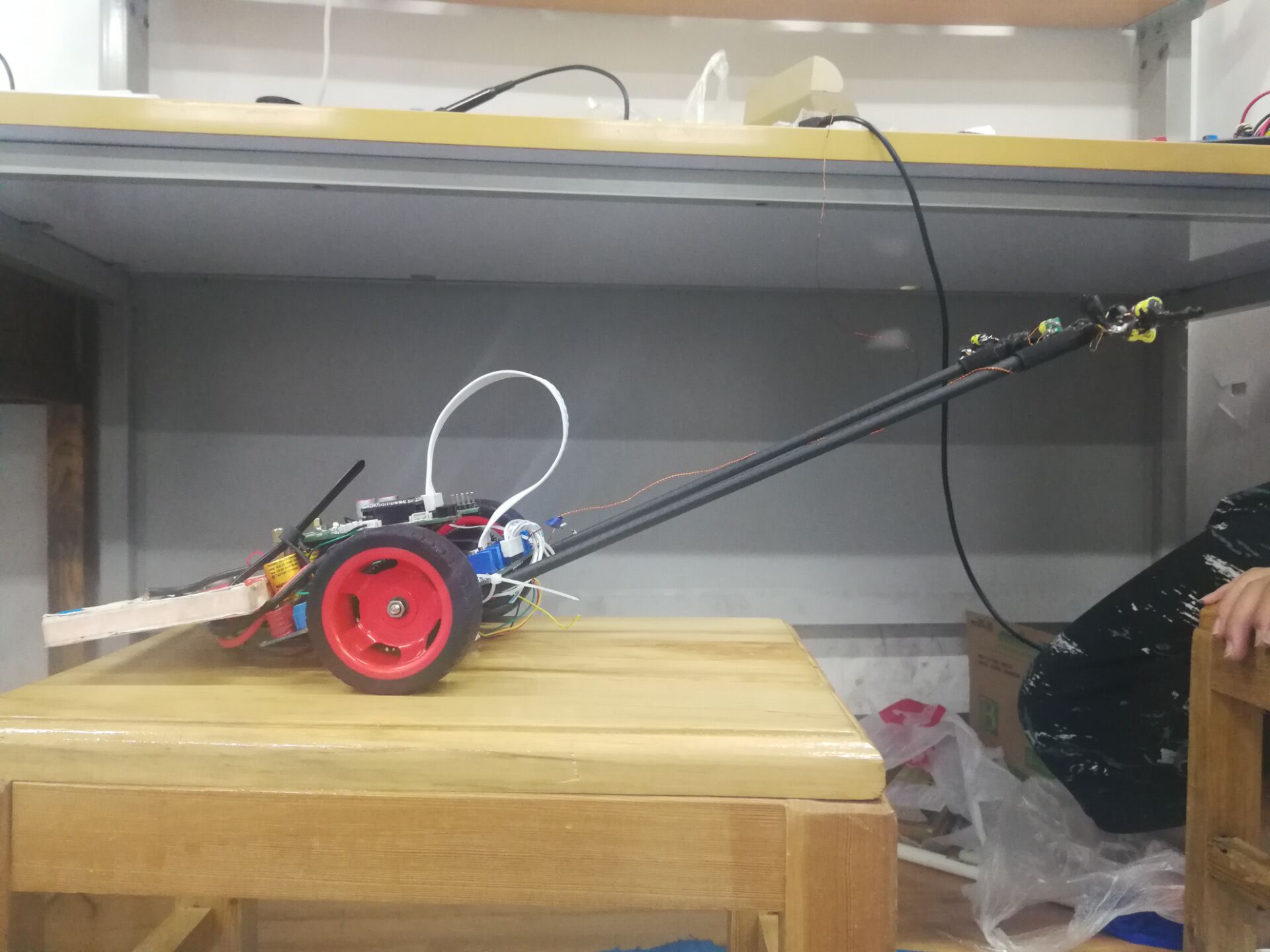
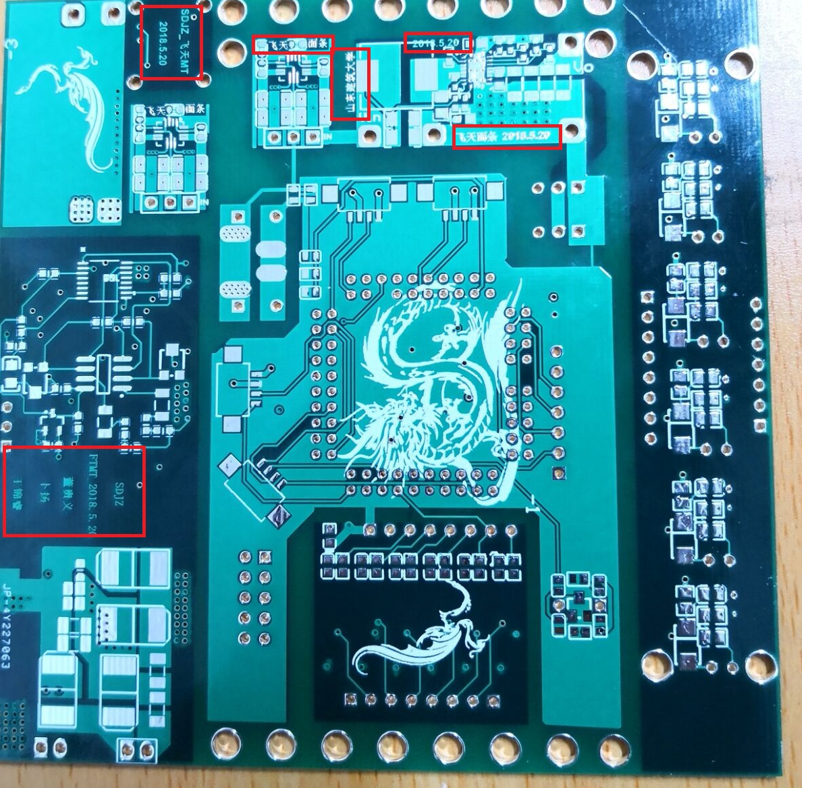
In this project, I participated in two Freescale competitions that involved developing an autonomous two-wheeled self-balancing vehicle. The vehicle's control system is powered by a Freescale series microcontroller, which ensures efficient and reliable performance. The primary feature of this vehicle is its ability to automatically track electromagnetic signals, which allows it to achieve the goal of autonomous driving. By detecting and following these signals, the vehicle can navigate through various environments without human intervention. The project required a deep understanding of microcontroller programming, control systems, and signal processing. The successful development of this autonomous two-wheeled self-balancing vehicle showcases the potential of integrating such technology in various applications, such as transportation, logistics, and other areas where autonomous navigation is essential.